Trắc nghiệm Dao động kỹ thuật Đại học Điện lực (EPU)
Từ khoá: trắc nghiệm dao động kỹ thuật EPU đại học điện lực dao động cơ học hệ số cản tần số riêng ôn thi dao động bài tập dao động thi online kỹ thuật trắc nghiệm có đáp án
Số câu hỏi: 301 câuSố mã đề: 7 đềThời gian: 1 giờ
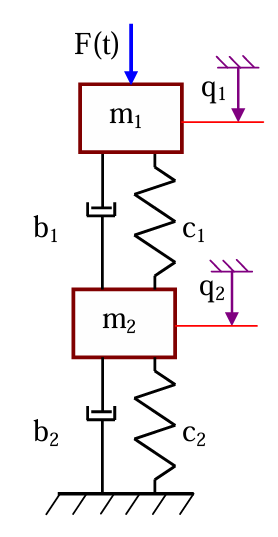
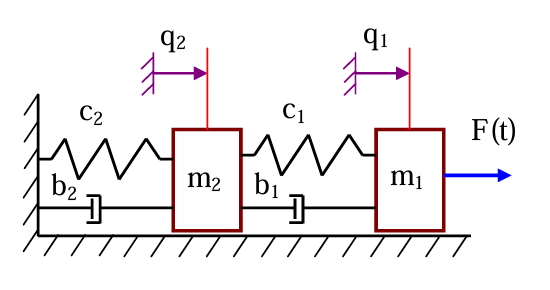
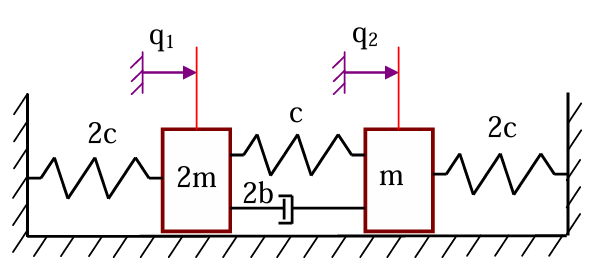
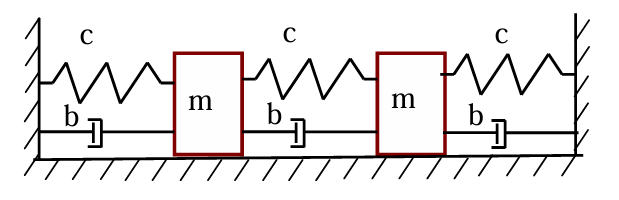
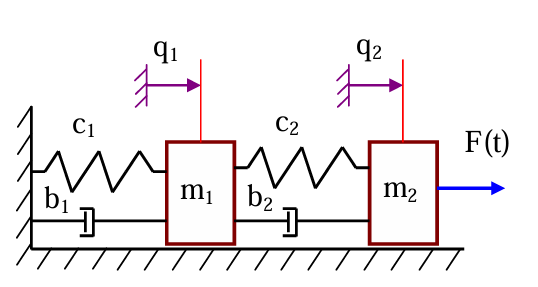
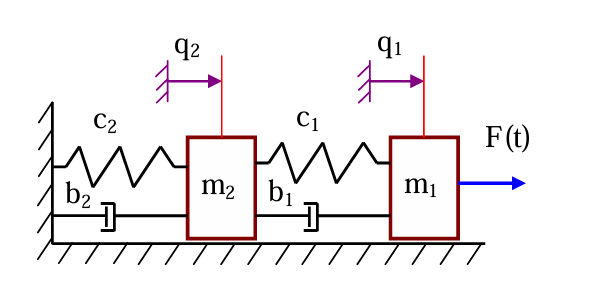
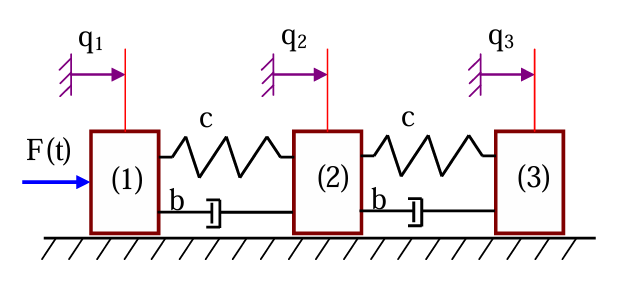
Cho mô hình dao động như hình vẽ. Bỏ qua khối lượng của các lò xo và các bộ cản nhớt, vật nặng m1 và m2 là cứng tuyệt đối. Biểu thức hàm hao tán (cản) của hệ được xác định như sau:
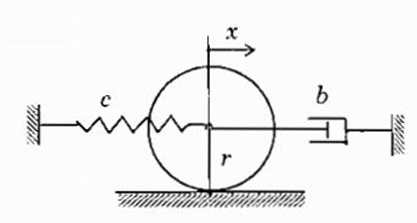
Một đĩa tròn đồng chất có khối lượng m=50kg. bán kính r=0,5m lăn không trượt trên nền ngang. Lò xo có độ cứng c=75N/m. Hệ số cản nhớt b=10Ns/m. Hãy xác định tần số dao động riêng của hệ .
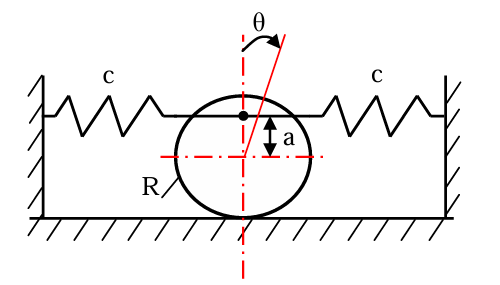
Cho cơ hệ như hình vẽ: Đĩa (có bán kính R, khối lượng là m) được nối với 2 lò xo có độ cứng là c tại điểm có khoảng cách với tâm đĩa là a. Đĩa chuyển động lăn không trượt trên mặt phẳng ngang (không có ma sát). Chọn tọa độ suy rộng là θ (là góc quay của đĩa). Giả thiết rằng dao động của đĩa là dao động nhỏ; bỏ qua khối lượng của các lò xo. Ở vị trí cân bằng lò xo không biến dạng. Biểu thức động năng của cơ hệ được xác định như sau:
Cho mô hình dao động như hình vẽ. Biểu thức động năng của hệ có dạng:
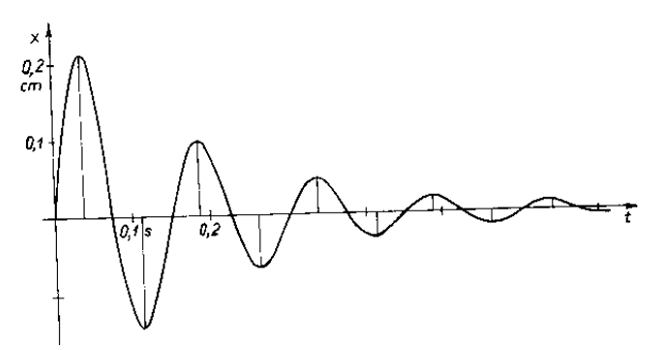
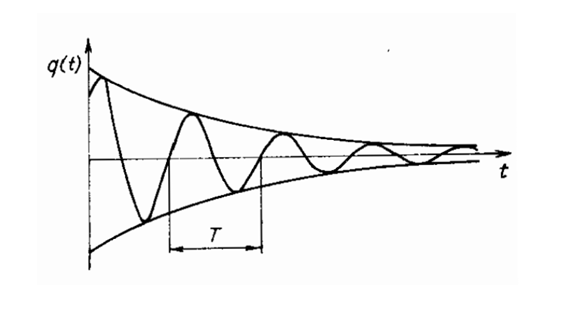
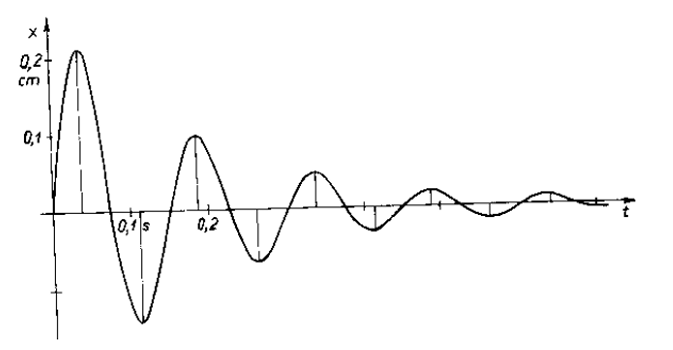
Hình dưới đây là đồ thị dao động tịnh tiến thẳng của một vật điểm có khối lượng m=0,5kg. Từ đồ thị hãy xác định chu kỳ và tần số dao động tắt dần.
Biết phương trình biểu diễn dao động của hệ n bậc tự do có dạng như sau: . Nếu và thì dao động của hệ là....?
Cho mô hình dao động như hình vẽ (m2, m1). Ma trận khối lượng của hệ được xác định như sau:
Xác định tần số dao động riêng của cơ hệ cho như hình vẽ, biết ,
khi
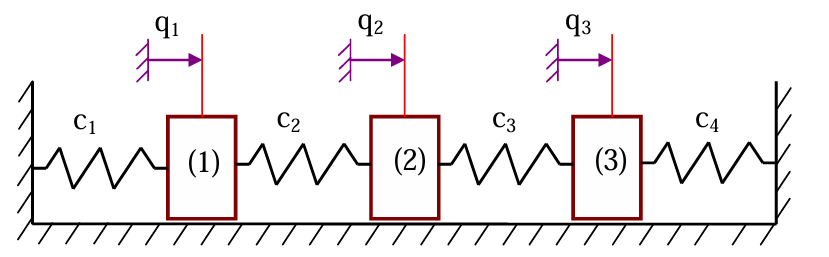
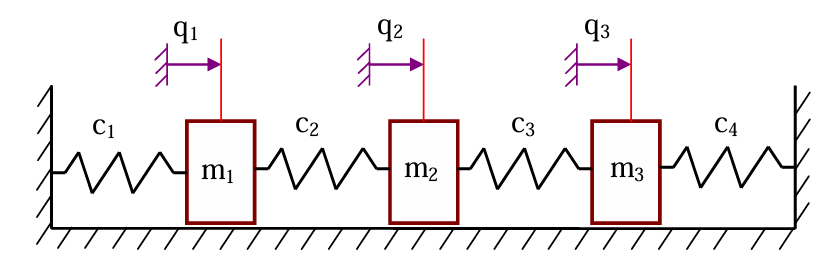
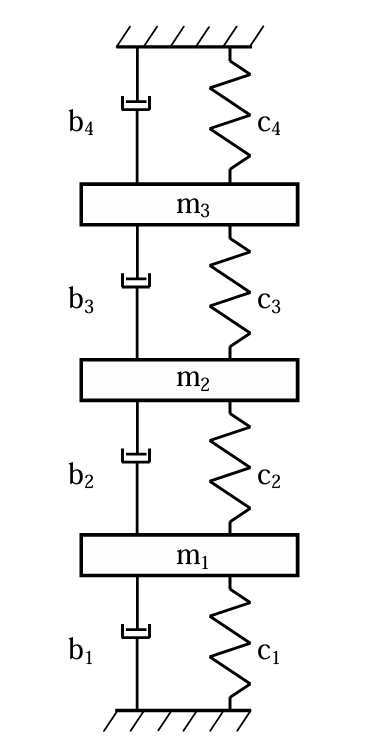
Cho mô hình dao động như hình vẽ (3 vật nặng). Phát biểu nào sau đây là sai ?
Cho mô hình dao động như hình vẽ. Ma trận khối lượng của hệ được xác định là:
Hình dưới biểu diễn quy luật dao động tự do tắt dần điều hòa (có dao động qua lại)
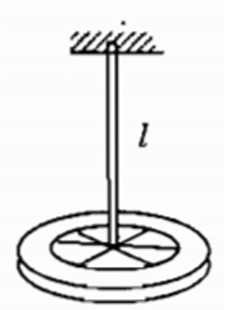
Vô lăng được gắn vào thanh bằng thép dài l=2m, đường kính d=0,5cm. Biết tần số dao động riêng của cơ hệ , độ cứng của thanh là . Mô men quán tính đối với trục quay của thanh và vô lăng là:
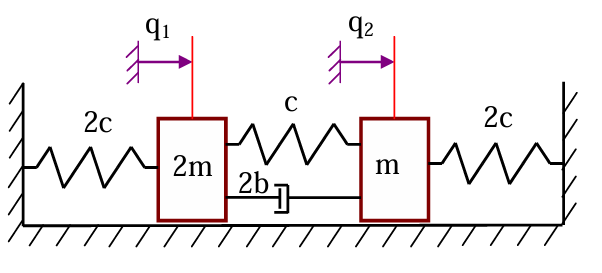
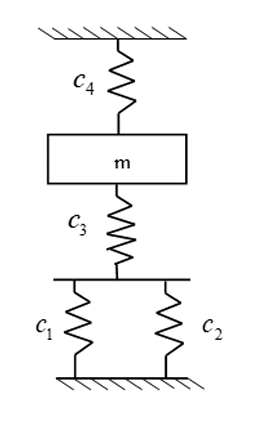
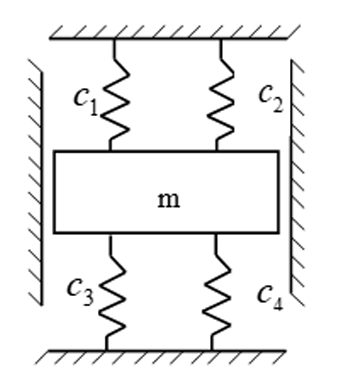
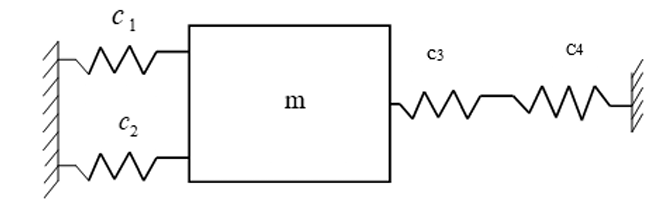
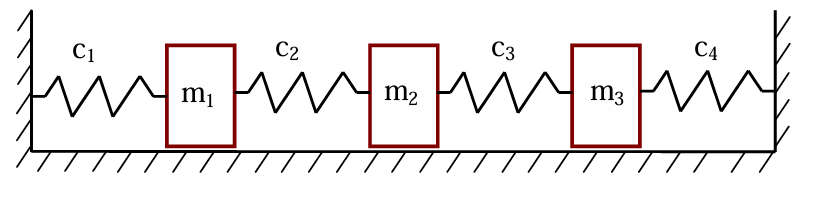
Cho hệ dao động gồm khối lượng và các lò xo mắc như hình vẽ (bốn lò xo mắc song song đỡ khối lượng m), hãy tính tần số dao động riêng của cơ hệ
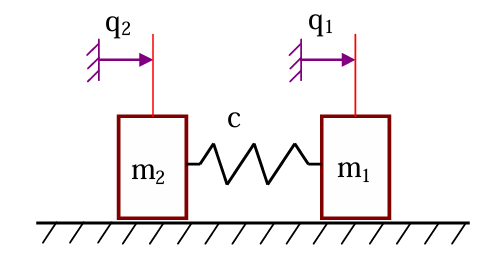
Cho cơ hệ dao động (tuyến tính) như hình vẽ (hai khối lượng m nối tiếp qua c). Số bậc tự do của cơ hệ là:...?
Cho mô hình dao động như hình vẽ (m1, m2, m3). Biểu thức động năng của khối lượng m3 của hệ có dạng:
Cho mô hình dao động m2-m1 với c2-c1. Biểu thức động năng của hệ có dạng:
Hình dưới đây là đồ thị dao động tịnh tiến thẳng của một vật điểm có khối lượng m=0,5kg. Từ đồ thị hãy xác định độ tắt loga và hệ số cản b.
Cho mô hình dao động 2 bậc tự do như hình vẽ. Biểu thức thế năng của hệ có dạng:
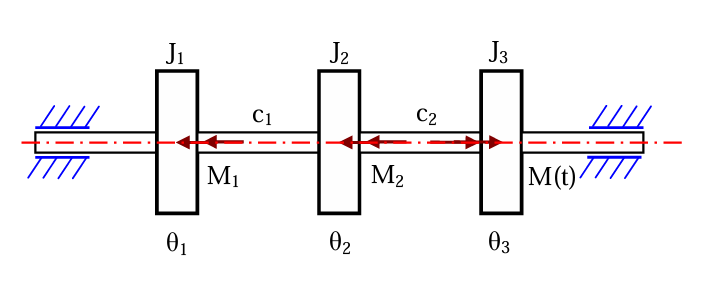
Cơ cấu truyền động của máy tiện được mô hình thành hệ ba đĩa có mô men quán tính đối với trục quay x là . Ngẫu lực ma sát nhớt ở các ổ đỡ tỉ lệ với vận tốc góc. Các đoạn trục có độ cứng xoắn là và (có khối lượng không đáng kể). Mô men xoắn của động cơ truyền qua dây đai là M(t). Chọn các tọa độ suy rộng là . Biểu thức động năng của cơ hệ được xác định như sau:
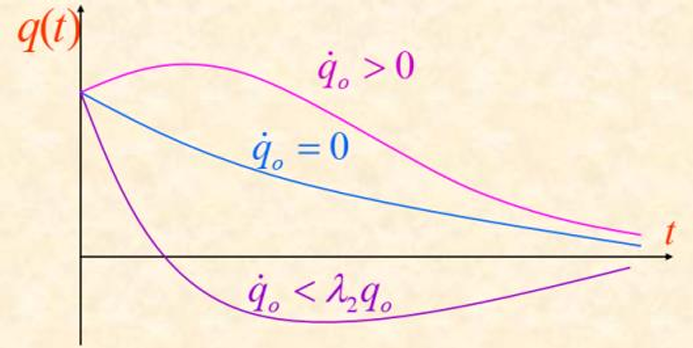
Hình dưới biểu diễn quy luật dao động tự do tắt dần trong trường hợp không có dao động (về trạng thái cân bằng nhanh chóng)
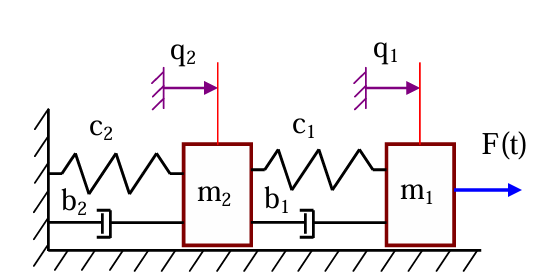
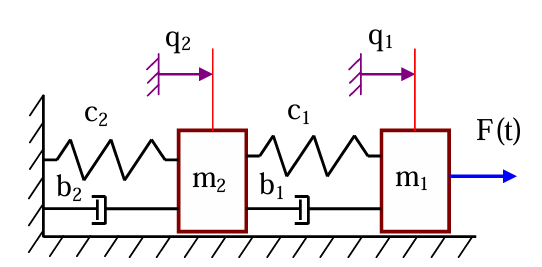
Cho mô hình dao động như hình vẽ (m1, b1, c1, m2, b2, c2). Số bậc tự do của cơ hệ bằng...?
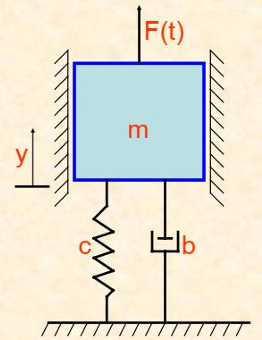
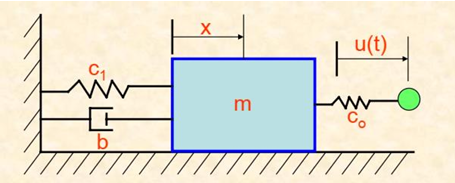
Cho sơ đồ dao động cưỡng bức của hệ khối lượng – lò xo chịu kích động điều hòa như hình vẽ. Phương trình vi phân biểu diễn kích động có dạng nào dưới đây.
Cho cơ hệ như hình vẽ, hãy xác định tần số dao động riêng của cơ hệ
Cho mô hình dao động như hình vẽ (m2-m1, b2-b1). Ma trận cản (hao tán) của hệ được xác định như sau:
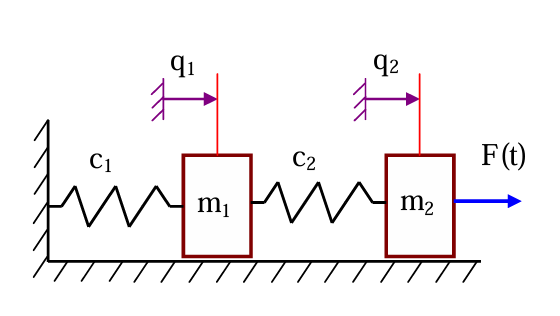
Cho mô hình dao động như hình vẽ (m1, m2). Biểu thức động năng của hệ có dạng:
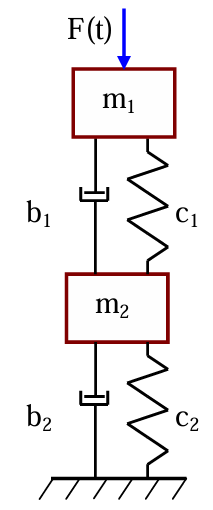
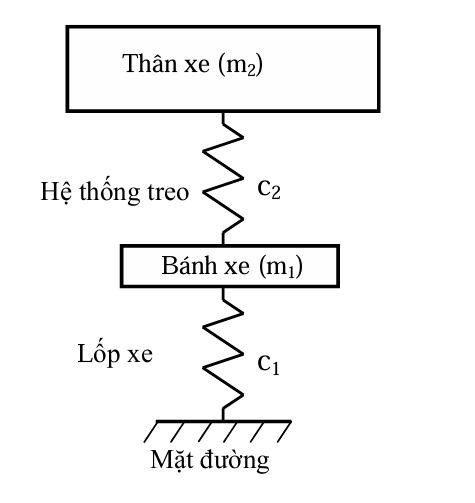
Mô hình hệ thống treo ô tô được đơn giản hóa như hình vẽ. Số các bậc tự do của cơ hệ bằng bao nhiêu:...?
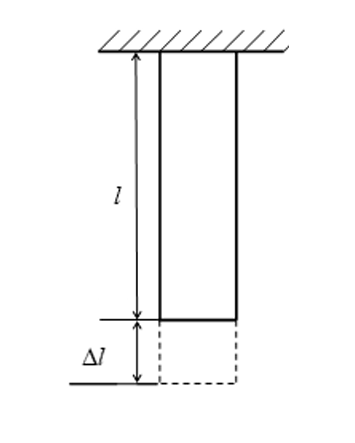
Cho thanh đàn hồi chịu kéo nén, gọi E là mô đun đàn hồi của vật liệu làm thanh, A là tiết diện ngang. Độ cứng quy đổi được xác định như sau
Cho mô hình dao động m2-m1 với b2-b1. Biểu thức hàm hao tán (cản) của hệ có dạng:
Cho mô hình dao động như hình vẽ (m1-m2). Ma trận khối lượng của hệ được xác định là:
Cho cơ hệ như hình vẽ. Ba toa xe (có khối lượng bằng nhau và bằng m) chuyển động trên đường nằm ngang. Độ cứng các khớp nối giữa các toa xe bằng c (các khớp nối có độ cứng bằng nhau), các cản nhớt là b (bỏ qua khối lượng các khớp nối). Gốc tọa độ chọn tại các điểm cân bằng tĩnh của các khối lượng. Ma trận cản của cơ hệ bằng...?
Cho cơ hệ dao động (tuyến tính) như hình vẽ (m1, m2, m3). Số dạng dao động riêng của cơ hệ (có thể có) tối đa là...?
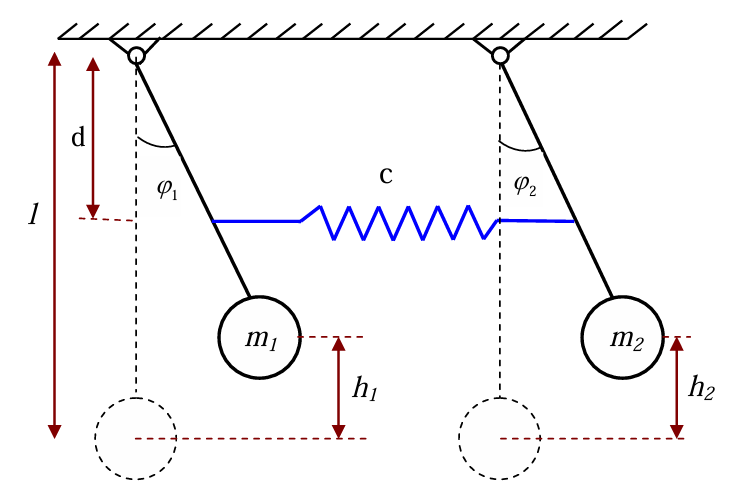
Một hệ hai con lắc có chiều dài mỗi thanh là l, khối lượng mỗi vật điểm là m1=m2= m. Hai thanh được nối với nhau bằng lò xo có hệ số cứng là c, ở vị trí cách trục quay một đoạn là d. Độ dài của lò xo ở trạng thái không biến dạng bằng khoảng cách giữa hai trục con lắc. Bỏ qua khối lượng của thanh, lò xo và bỏ qua lực cản.
Cho mô hình dao động cưỡng bức bởi lực kích động đàn hồi như hình vẽ. Biết hàm . Phương trình vi phân dao động của cơ hệ là:
Cho mô hình dao động của máy rung như hình vẽ. Số bậc tự do của cơ hệ bằng...?
2 mã đề 80 câu hỏi
2 mã đề 80 câu hỏi