[Mất hình] Tổng Hợp Câu Hỏi Ôn Tập Lý Thuyết Điều Khiển Tự Động P1 EPU
Tham khảo ngay bộ câu hỏi ôn tập Lý Thuyết Điều Khiển Tự Động Phần 1 từ Đại học Điện Lực (EPU), miễn phí và có kèm đáp án chi tiết. Tài liệu này bao gồm các câu hỏi được biên soạn bám sát chương trình học, giúp sinh viên dễ dàng ôn luyện và củng cố kiến thức về lý thuyết điều khiển tự động. Đây là nguồn tài liệu hữu ích để chuẩn bị cho các kỳ thi giữa kỳ và cuối kỳ, hỗ trợ quá trình học tập một cách hiệu quả.
Từ khoá: Câu hỏi ôn tập Lý Thuyết Điều Khiển Tự Động 1Đại học Điện LựcEPUmiễn phícó đáp ánôn tập Điều Khiển Tự Độngkiểm tra giữa kỳkiểm tra cuối kỳtài liệu học Điều Khiển Tự Độngđề thi Điều Khiển Tự Độngluyện thi Điều Khiển Tự ĐộngĐại học Điện Lực EPU
Số câu hỏi: 222 câuSố mã đề: 6 đềThời gian: 1 giờ
 .
. .
. .
. .
.
 .
. .
. .
. .
. .
.


 .
. .
. .
. .
.
 .
. .
. .
. .
.
 .
. .
. .
. .
.


 .
. .
. .
. .
.
 .
. .
.


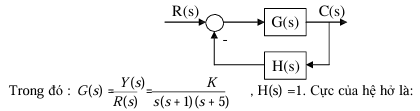
0, -1, -5

 A
A B
B C
C D
D1 mã đề 30 câu hỏi
5 mã đề 139 câu hỏi
1 mã đề 21 câu hỏi
3 mã đề 79 câu hỏi
1 mã đề 18 câu hỏi