Đề Thi Lý Thuyết Điều Khiển Tự Động 1 EPU Đại học Điện lực Khám phá đề thi trắc nghiệm online miễn phí có đáp án chính xác cho môn Lý Thuyết Điều Khiển Tự Động 1 tại Đại học Điện lực (EPU). Bộ đề được biên soạn tỉ mỉ nhằm củng cố kiến thức nền tảng, phát triển tư duy phân tích và ứng dụng lý thuyết vào thực tiễn, hỗ trợ sinh viên ôn tập hiệu quả cho kỳ thi.
Từ khoá: đề thi online miễn phí đáp án lý thuyết điều khiển tự động 1 EPU Đại học Điện lực ôn tập trắc nghiệm kiến thức nền tảng ứng dụng thực tiễn
Câu 1: Tìm số nhánh của quỹ đạo nghiệm số của hệ thống hồi tiếp âm đơn vị có hàm
truyền hệ hở là : G ( s ) = K ( 1 + 0.1 s ) ( 1 + 0.01 s ) 2 G(s) = \frac{K(1 + 0.1s)}{(1 + 0.01s)^2} G ( s ) = ( 1 + 0.01 s ) 2 K ( 1 + 0.1 s )
A. Quĩ đạo nghiệm số có 1 nhánh
B. Quĩ đạo nghiệm số có 2 nhánh
C. Quĩ đạo nghiệm số có 3 nhánh
D. Quĩ đạo nghiệm số có 4 nhánh
Câu 2: Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI(proportional integral) liên tục có dạng.
Câu 3: Tần số cắt biên:
A. Là tần số tại đó biên độ của đặc tính tần số bằng 1(hay bằng 0dB)
B. Là tần số tại đó pha của đặc tính tần số bằng -π (hay -1800 )
C. Là tần số tại đó có độ dự trữ biên
D. Là tần số tại đó có đỉnh cộng hưởng
Câu 4: .
C. Ở biên giới ổn định
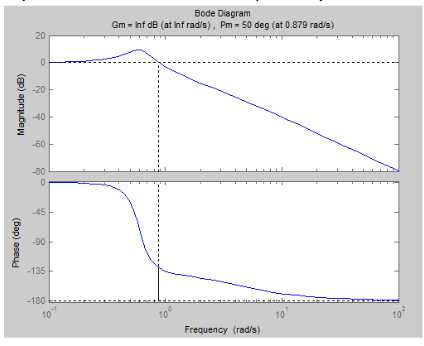
Câu 5: Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
C. Ở biên giới ổn định
Câu 6: Hệ thống điều khiển là không ổn định nếu:
A. Tất cả các cực của hệ thống có phần thực dương.
B. Có ít nhất một nghiệm cực có phần thực dương
C. Có các nghiệm zero dương
D. Không xác định được.
Câu 7: G(jω)=P(ω)+jQ(ω)=M(ω)ejφ(ω), trong đó:
A. M(ω) là đáp ứng pha, φ(ω) là đáp ứng biên độ
B. M(ω) là độ lợi, ω là tần số cắt
C. M(ω) là đáp ứng biên độ, φ(ω) là đáp ứng pha
D. P(ω) là pha của hệ thống
Câu 8: .
A. Hệ thống không ổn định
B. Hệ thống có 2 nghiệm cực và 1 zero
C. Hệ thống có 3 nghiệm cực
D. Hệ thống có 3 nghiệm cực và 1 zero
Câu 9: Tìm số nhánh của qũi đạo nghiệm số của hệ thống hồi tiếp âm đơn vị có hàm truyền
hệ hở là: G ( s ) = K s ( s + 2 ) ( s + 3 ) G(s) = \frac{K}{s(s + 2)(s + 3)} G ( s ) = s ( s + 2 ) ( s + 3 ) K
A. Quĩ đạo nghiệm số có 1 nhánh
B. Quĩ đạo nghiệm số có 2 nhánh
C. Quĩ đạo nghiệm số có 3 nhánh
D. Quĩ đạo nghiệm số có 4 nhánh
Câu 11: Theo tiêu chuẩn Bode hệ Gk(s) ổn định nếu Go(s) có độ dự trữ biên (G M) và độ dự trữ pha (ΦM):
Câu 12: .
B. .
Câu 13: Khâu tích phân lý tưởng có hàm truyền G(s) =K/s
C. L(ω)= 20lg(ω) ; φ(ω)= - 90
D. L(ω)= 20lgK - 20lg(ω) ; φ(ω)= - 90
Câu 14: Bộ bù trễ pha được sử dụng khi:
A. Muốn giảm sai số xác lập của hệ thống
B. Muốn tăng sai số xác lập của hệ thống
C. Muốn tăng thời gian đáp ứng quá độ của hệ thống
D. Tín hiệu vào của hệ thống là hàm nấc đơn vị
Câu 15: Hàm truyền đạt của hệ thống song song :
A. G(s)= Tổng của các Gi(s)
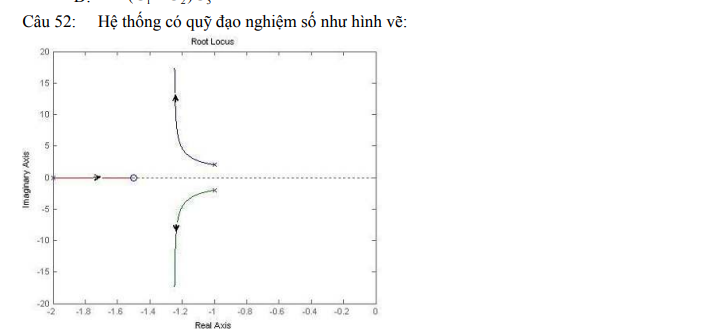
B. G(s) = Tích của các Gi(s
C. G(s)= Hiệu của các Gi(s)
D. Tỉ số giữa tín hiệu ra và tín hiệu vào
Câu 16: Khối mạch đo trong hệ thống điều khiển vòng kín có nhiệm vụ:
A. Đo tín hiệu điện ở ngõ ra của hệ thống
B. Đo tín hiệu điều khiển
C. Đo và hiển thị ngõ ra.
D. Đo đáp ứng ngõ ra của hệ thống để cung cấp cho bộ điều khiển
Câu 17: Cho phương trình đặc trưng s 4 + 12 , 5 s 3 + s 2 + 5 s + K = 0 s^4 + 12,5s^3 + s^2 + 5s + K = 0 s 4 + 12 , 5 s 3 + s 2 + 5 s + K = 0
Câu 18: Biến đổi Laplace của hàm nấc đơn vị (step) f(t)=1(t).
Câu 19: Các phần tử ở hàng 2 của bảng Routh được lập từ:
A. . Các hệ số có chỉ số lẻ
B. Các hệ số có chỉ số chẵn.
C. Các hệ số có chỉ số giảm dần.
D. Các hệ số có chỉ số tăng dần.
Câu 20: Hệ thống phi tuyến là hệ thống
A. Có một ngõ vào một ngõ ra
B. Có tín hiệu ra là phi tuyến theo thời gian
C. Được mô tả bởi phương trình vi phân phi tuyến
D. Nhiều ngõ vào và một ngõ ra
Câu 21: Theo định lý Shanon để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì:
C. Tần số lấy mẫu được chọn tuỳ ý
Câu 22: .
Câu 23: Bộ bù trễ pha làm cho hệ thống:
B. Có thời gian đáp ứng quá độ chậm
C. Có thời gian đáp ứng quá độ nhanh
D. Có băng thông tăng
Câu 24: Khâu hiệu chỉnh PI (Proportional Integral ) có đặc điểm là:
A. Làm chậm đáp ứng quá độ, tăng độ vọt lố, giảm sai số xác lập.
B. Làm chậm đáp ứng quá độ, giảm độ vọt lố, giảm sai số xác lập
C. Làm tăng đáp ứng quá độ, tăng độ vọt lố, tăng sai số xác lập
D. Làm tăng đáp ứng quá độ, giảm độ vọt lố, giảm sai số xác lập
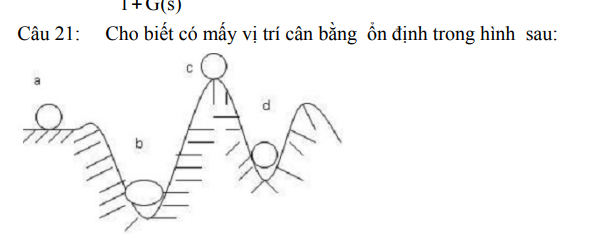
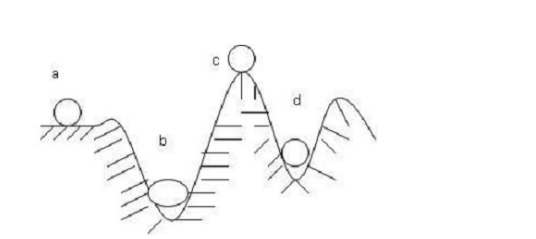
Câu 25: Cho biết vị trí cân bằng ở biên giới ổn định trong hình sau:.
Câu 26: Hệ thống rời rạc là ổn định nếu tất cả các nghiệm của phương trình đặc tính
A. Nằm bên trái mặt phẳng phức
B. Nằm bên trong vòng tròn đơn vị
C. Nằm bên ngoài vòng tròn đơn vị
D. Nằm bên phải mặt phẳng phức
Câu 27: Hệ thống bất biến theo thời gian là hệ thống có:
A. Tín hiệu ra không thay đổi theo thời gian
B. Phương trình vi phân mô tả hệ thống không thay đổi
C. Tín hiệu vào không thay đổi theo thời gian
D. Hệ số của phương trình vi phân mô tả hệ thống không thay đổi
Câu 28: .
A. Hệ thống ổn định, có 1 nghiệm có phần thực âm
B. Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phứC
C. Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
D. Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
Câu 29: DAC là
A. Bộ chuyển đổi tín hiệu từ dạng số sang dạng tương tự
B. Bộ khuếch đại tín hiệu
C. Bộ chuyển đổi tín hiệu từ dạng tương tự sang dạng số
D. Bộ thay đổi tần số của tín hiệu vào
Câu 30: .
A. C là ma trân {1 x n}
B. C là ma trận {n x 1}
C. C là ma trận {n x n}
D. C là ma trận {n x m}, với n khác m
Câu 31: Kỹ thuật điều khiển tự động có thể được ứng dụng trong lĩnh vực kỹ thuật nào?
A. Cơ khí và hàng không.
C. Hóa học và môi trường.
D. Tất cả các câu trên đều đúng.
Câu 32: Hệ thống hồi tiếp âm đơn vị; có hàm truyền vòng hở : G ( s ) = K ( s + 1 ) s ( s + 2 ) 2 ( s + 5 ) G(s) = \frac{K(s + 1)}{s(s + 2)^2(s + 5)} G ( s ) = s ( s + 2 ) 2 ( s + 5 ) K ( s + 1 )
B. QĐNS có 3 nhánh tiến đến vô cùng và 1 nhánh tiến đến zero
D. QĐNS có 1 nhánh tiến đến zero và 2 nhánh tiến đến vô cùng
Câu 33: Phương trình vi phân biểu diễn khâu nguyên hàm với K là hê số truyền của phần tử
Câu 34: Hệ thống có 5 nghiệm cực và 1 zero :
A. Quỹ đạo nghiệm số có 5 nhánh
B. Quỹ đạo nghiệm số có tiệm cận
C. Quỹ đạo nghiệm số có 1 nhánh tiến đến 1 zero và 4 nhánh tiến đến vô cùng
D. Quỹ đạo nghiệm số có điểm tách nhập
Câu 35: .
A. .
Câu 36: Biểu đồ Bode biên độ là đồ thị biểu diễn mối quan hệ :
A. của đáp ứng biên độ theo tần số
B. của logarith đáp ứng biên độ theo tần số
C. của đáp ứng pha theo tần số
D. của logarith đáp ứng pha theo tần số
Câu 37: Ưu điểm của hệ thống điều khiển vòng kín là:
A. Hoạt động chính xác
B. Linh hoạt do có sự hồi tiếp từ ngõ ra về ngõ vào của hệ thống
C. Làm tăng sai số xác lập
Câu 38: .
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Đường cong Nyquist bao điểm (-1,j0) 2 vòng theo chiều dương
Câu 39: Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với:
A. B là ma trân {1 x n}
B. B là ma trận {n x 1}
C. B là ma trận {n x n}
D. B là ma trận {n x m}, với n khác m
Câu 40: Hệ thống liên tục ổn định nếu tất cả các nghiệm của phương trình đặc tính:
A. Nằm bên phải mặt phẳng phức
C. Nằm bên trái mặt phẳng phức
D. Nằm trên trục thực